

See last chapter in this document for a log/history.
Inhalt
Overview
This page collects information and ideas about a 3d printed hand prosthesis for a kid from iraq.
| NOTE: | This is work in progress. |
|---|
This work is done as part of the e-nable project http://enablingthefuture.org with the help of two other volunteers: Holly and Marko (todo: mention their email adress here?).
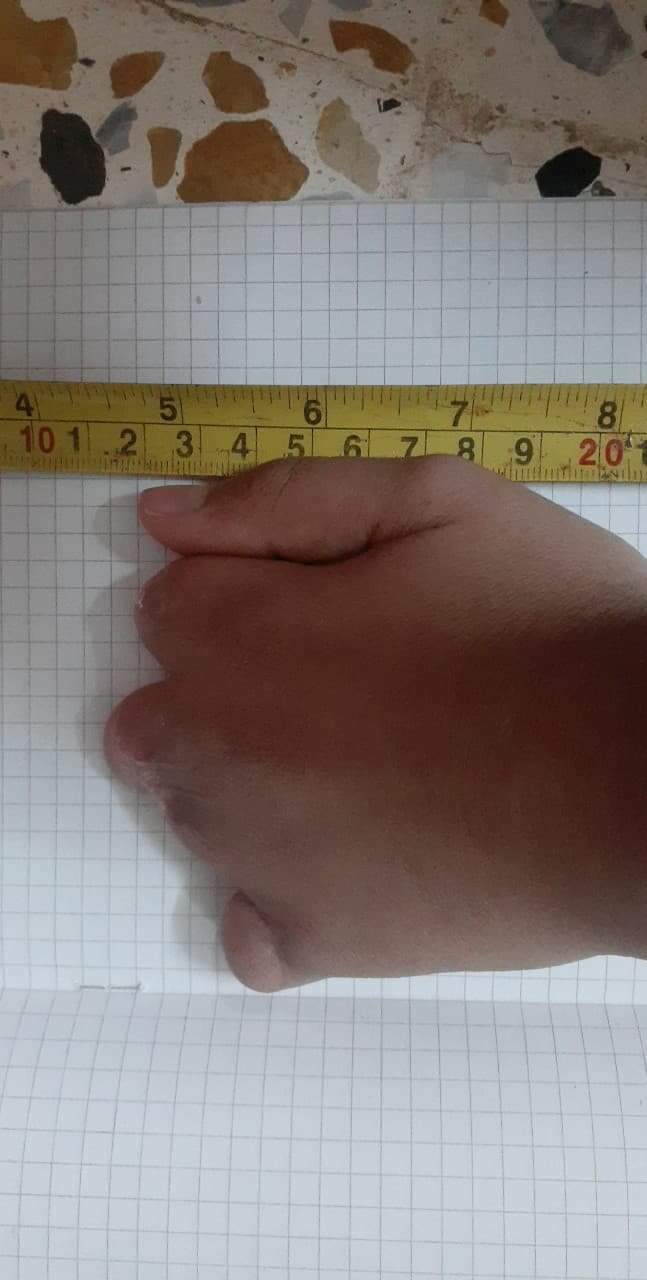
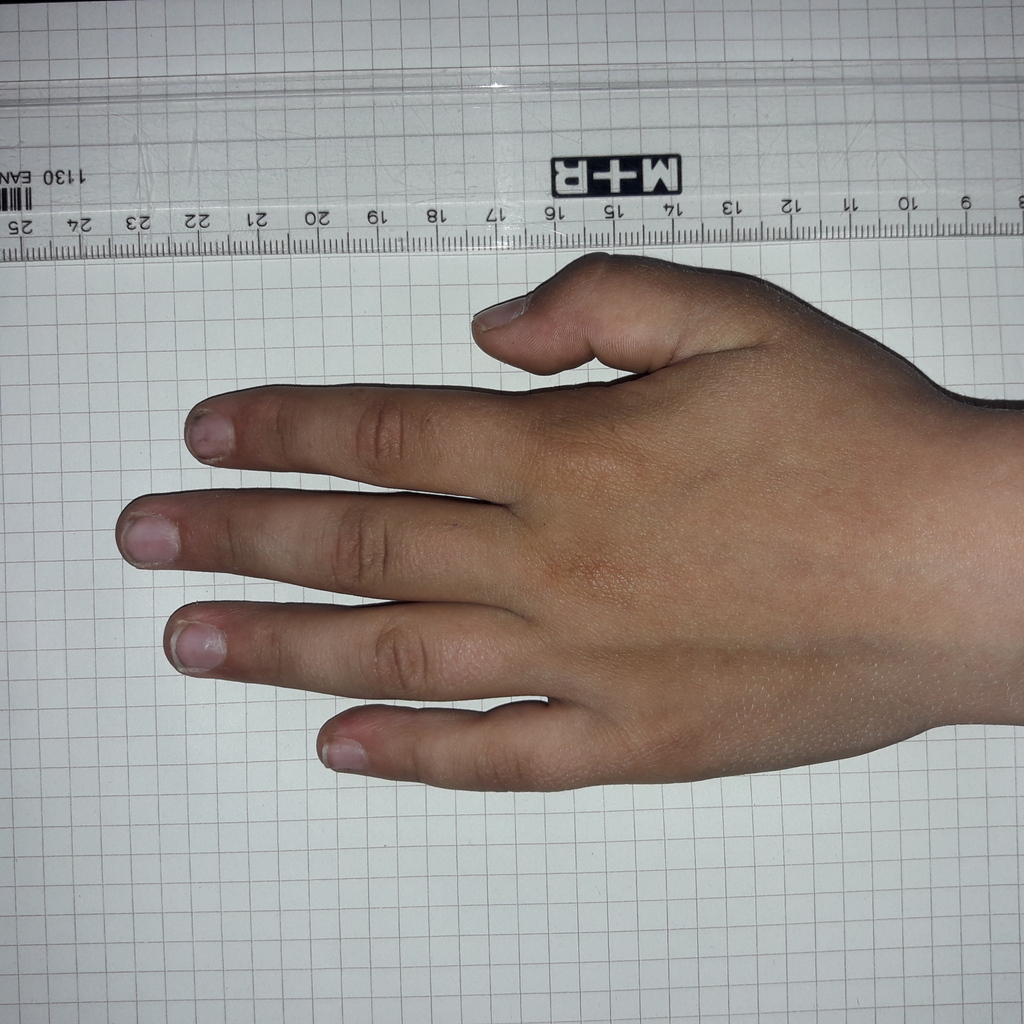
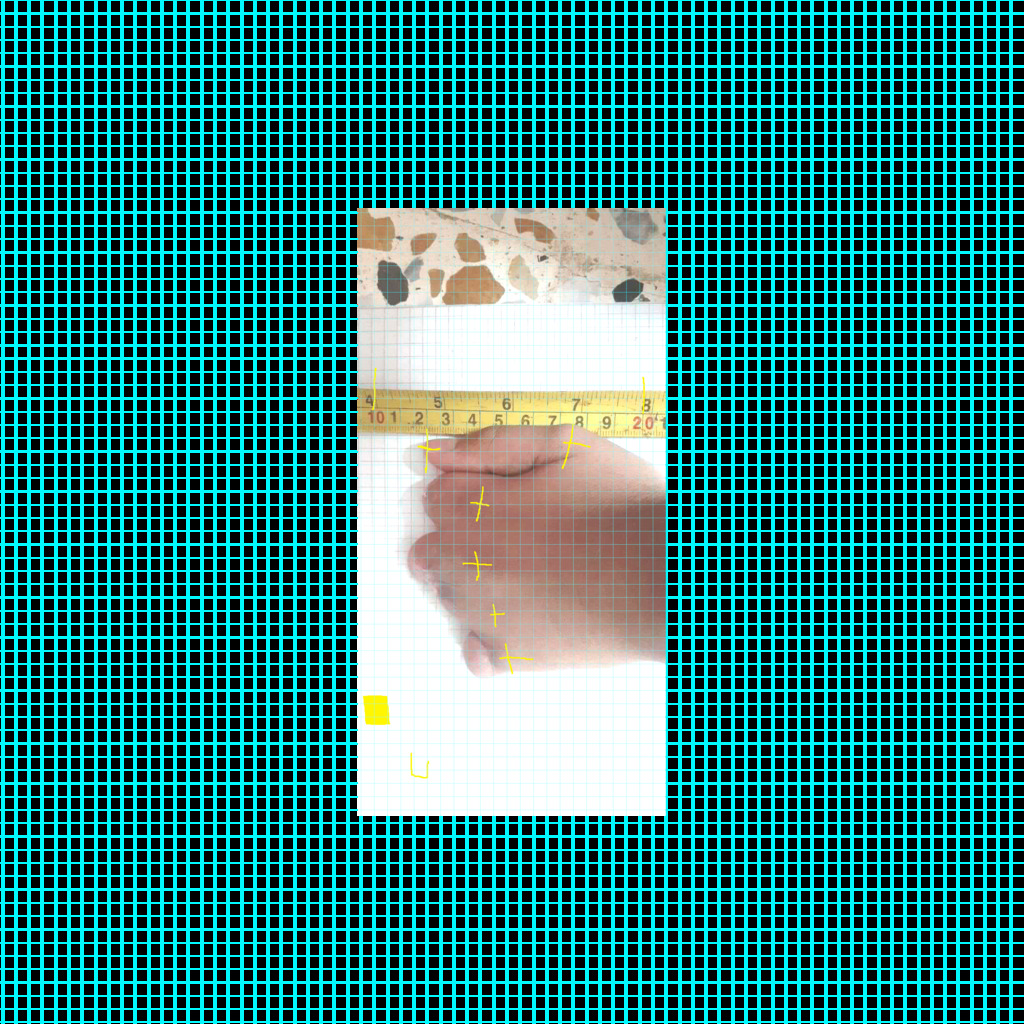
The receipient (Bashar) is a 9 year old kid from iraq (mosul?). He has lost four fingers of his left hand in an accident. Here is a picture of his left hand:
Possible devices, requirements
First of all, we have to select a 3d design of the hand prosthesis, the requirements for such a design are:
- The receipient has a working thumb, so we need a thumbless design.
- The receipient has four working finger-stumbs, so the prosthesis has to have enough room for them.
- Even better would be a design that uses his finger-stumbs, so it is not just wrist-powered, but also "finger-powered".
- Because there is no medical help on site (todo: ask firas) and the receipient is far away, i think we should prefer a simple device.
Todo/question: should we left-out the little finger because of skin-bulge, finger joint not in-row with other fingers.
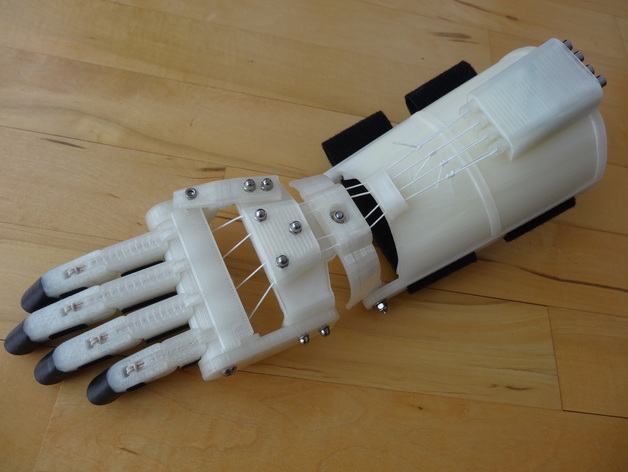
Raptor Reloaded, Thumbless & Extra length https://www.thingiverse.com/thing:2840414
Pros:
- Thumbless design (requirement 1).
- Wrist- and finger-powered.
- Should have enough room for finger-stumbs, could be scaled for better match.
Cons:
- A bit complicated, many parts.
I'm calling this the raptor-extra version, for simplicity.
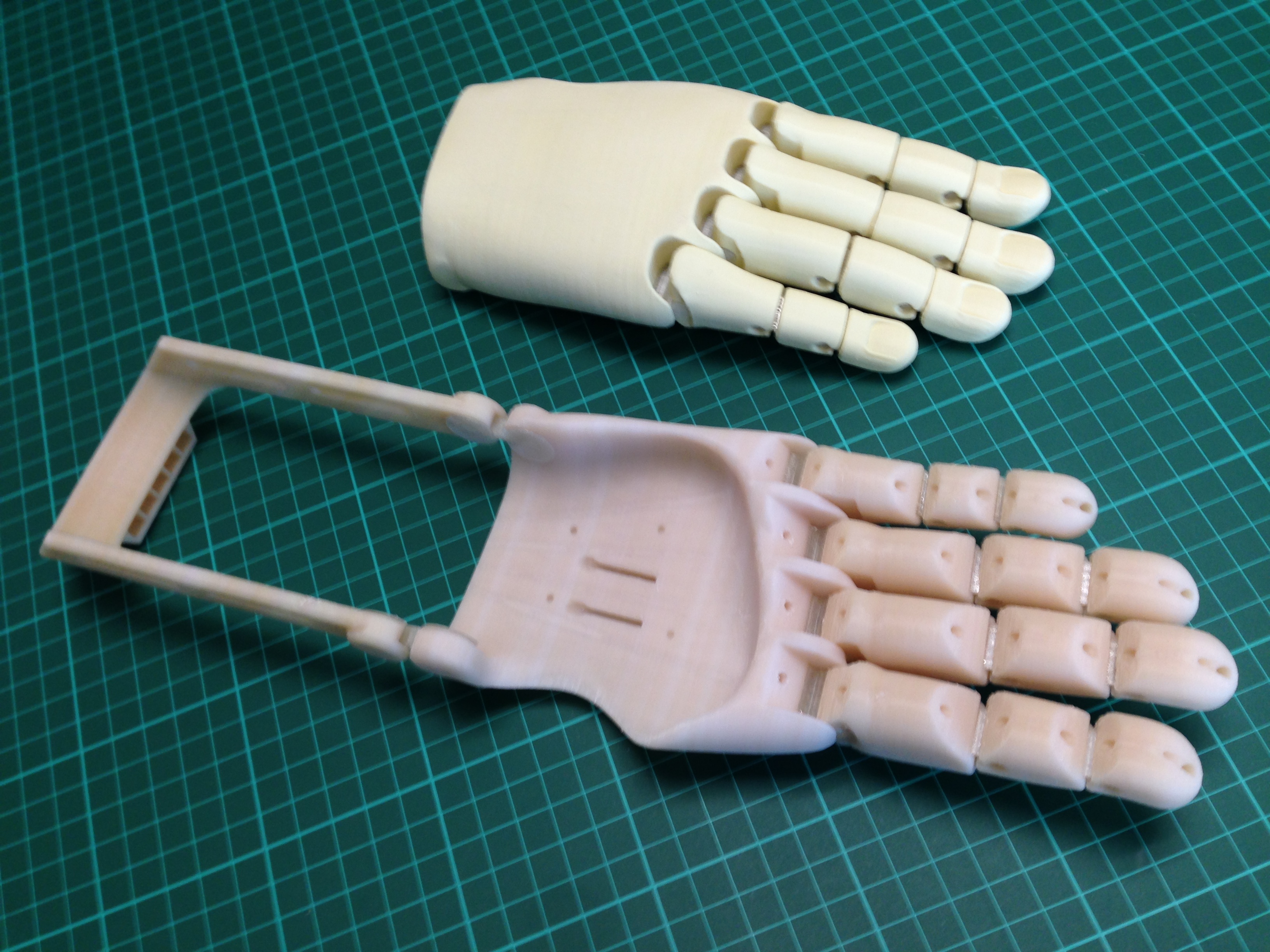
Raptor Reloaded, Thumbless, three fingers https://www.thingiverse.com/thing:2840400
Pros:
- Thumbless design (requirement 1).
- Wrist- and finger-powered.
- Should have enough room for finger-stumbs, could be scaled for better match.

A custom design, Knick-finger based http://enablingthefuture.org/the-knick-finger/
Pros:
- Thumbless design, of course.
- Receipient can use his existing fingerstumbs.
- Simple design.
Cons:
- Are fingerstumbs are long enough for this type of device?

A three-finger version with glove, https://www.thingiverse.com/make:63686:

I think we should left out the little finger because of the skin-bulge - so just a three finger version.
Also i would like to connect the three finger-sockets for better grip and to avoid a slip of of the device.
| Todo: | make a drawing or simple design to better show this idea. |
|---|
I'm calling this the multi-knickfinger version, for simplicity.
Conclusion, so far
I would like to do the following:
- Scale and print the raptor-extra version to get started and to get things going.
- Desing and create the multi-knickfinger version, but this will take longer...
Devices that will (likely) not work good
Some existing designs that we looked into, but are probably not working good enough. All existing devices with a thumb will not work, of course.
e-NABLE Phoenix Hand v2 - Thumbless https://www.thingiverse.com/thing:2838726
Pros:
- Thumbless design (requirement 1).
Cons:
- Wrist-powered only.
- Not enough room for finger-stumbs?
- Right hand version, must be mirrored.
Second Degree Hand https://www.thingiverse.com/thing:300499
Pros:
- Thumbless design (requirement 1).
Cons:
- Wrist-powered only.
- Not enough room for finger-stumbs?
- Extra degree of freedom not neccessary (requirement 4).
Flexy-Hand 2, thumbless https://www.thingiverse.com/thing:380665
Pros:
- Thumbless design (requirement 1).
Cons:
- Wrist-powered only.
- Not enough room for finger-stumbs?
Note to myself: found another similar device with extra degree of movement.
Kinetic Hand 2, thumbless https://www.thingiverse.com/thing:4618922
Pros:
- Thumbless design available ? (requirement 1).
Cons:
- Wrist-powered only.
- Not enough room for finger-stumbs?
- Needs parts printed with flexible material (TPU, NinjaFlex), not so simple (requirement 4)

Testmodel of hand
For better scaling and testing of the 3d-design or the printed hand a 3d-model or mold-cast of bashar's hand would be great. But i think this is out of reach.
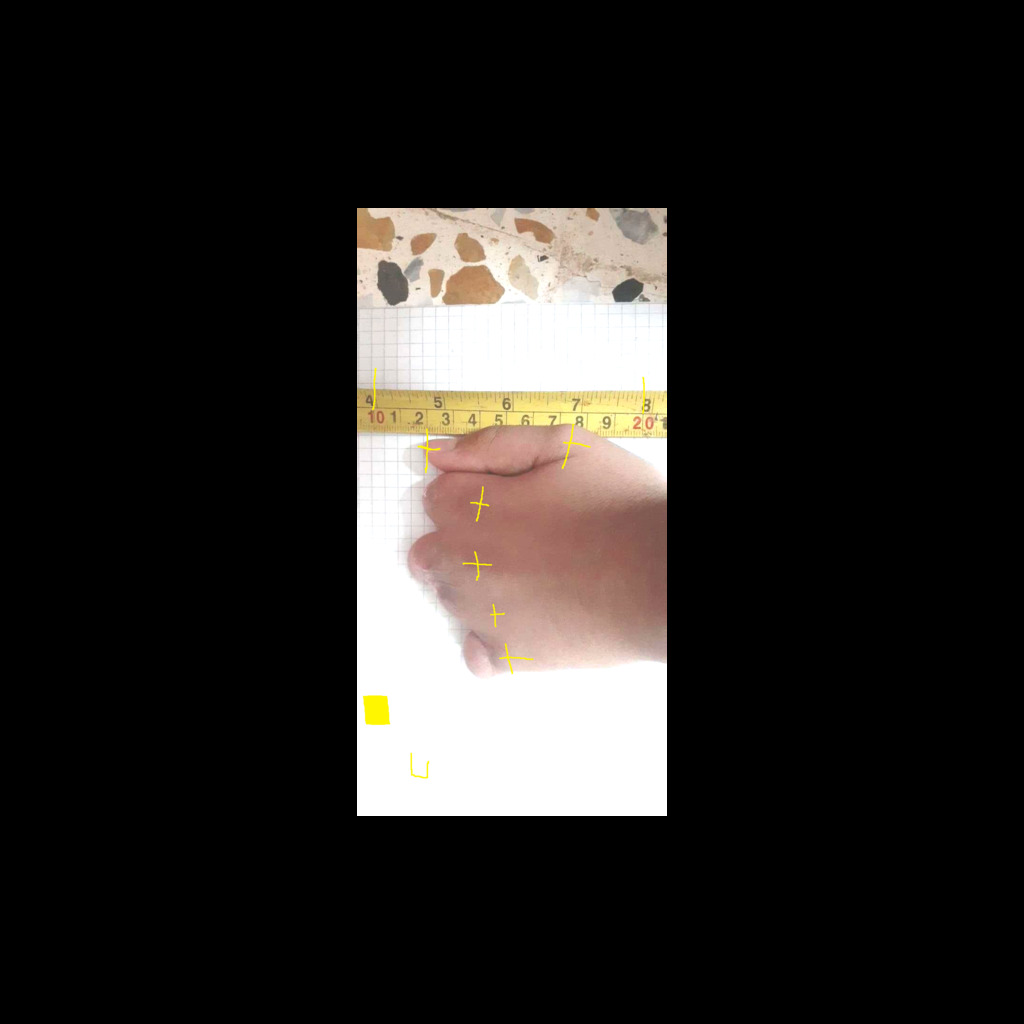
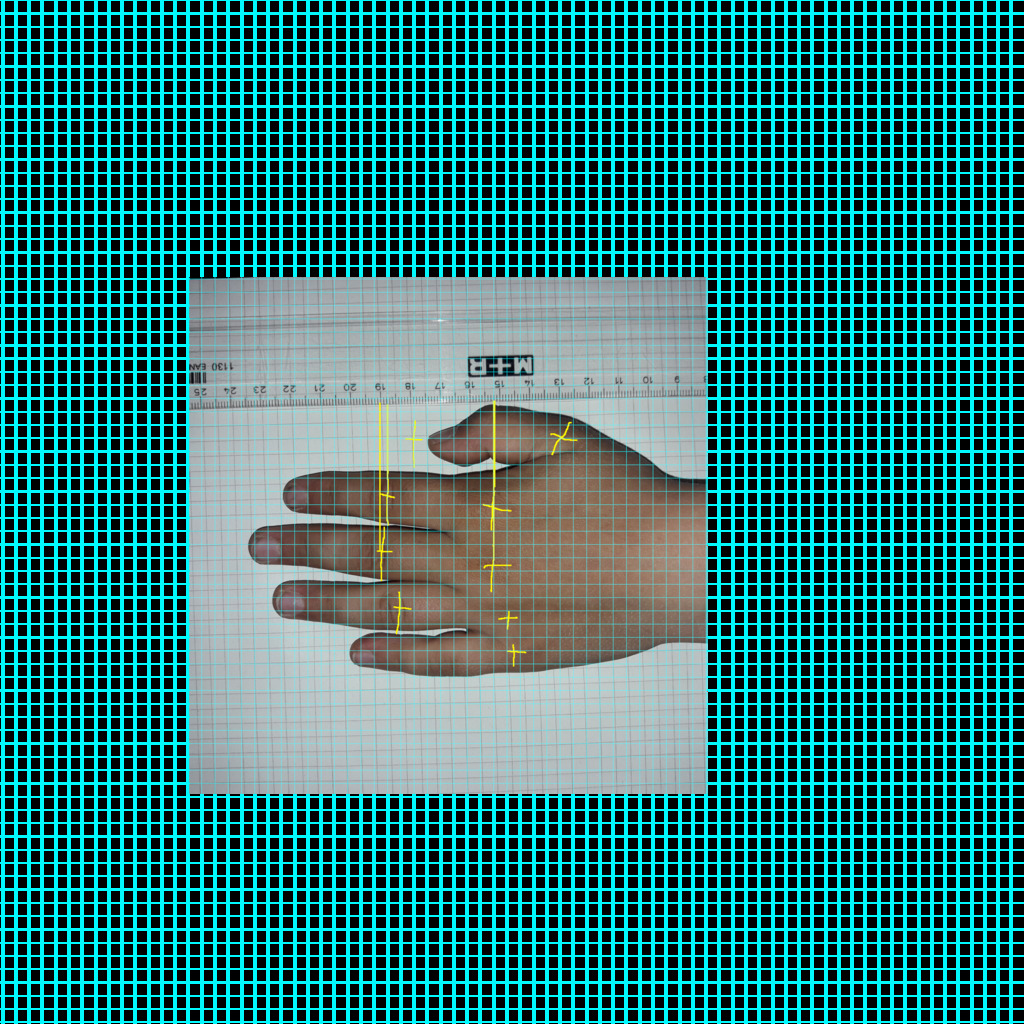
Maybe we can create a model of bashar's hand from its pictures, another idea is to create a model of the left hand from my 9 year old son sven and merge it with data from bashar, here is a photo of it:
Some possibly usable 3d handmodels:
- https://www.thingiverse.com/thing:1755922
- https://www.thingiverse.com/thing:4711399
- https://www.thingiverse.com/thing:1007589
- https://www.thingiverse.com/thing:287290, smoothed version: https://www.thingiverse.com/thing:290106
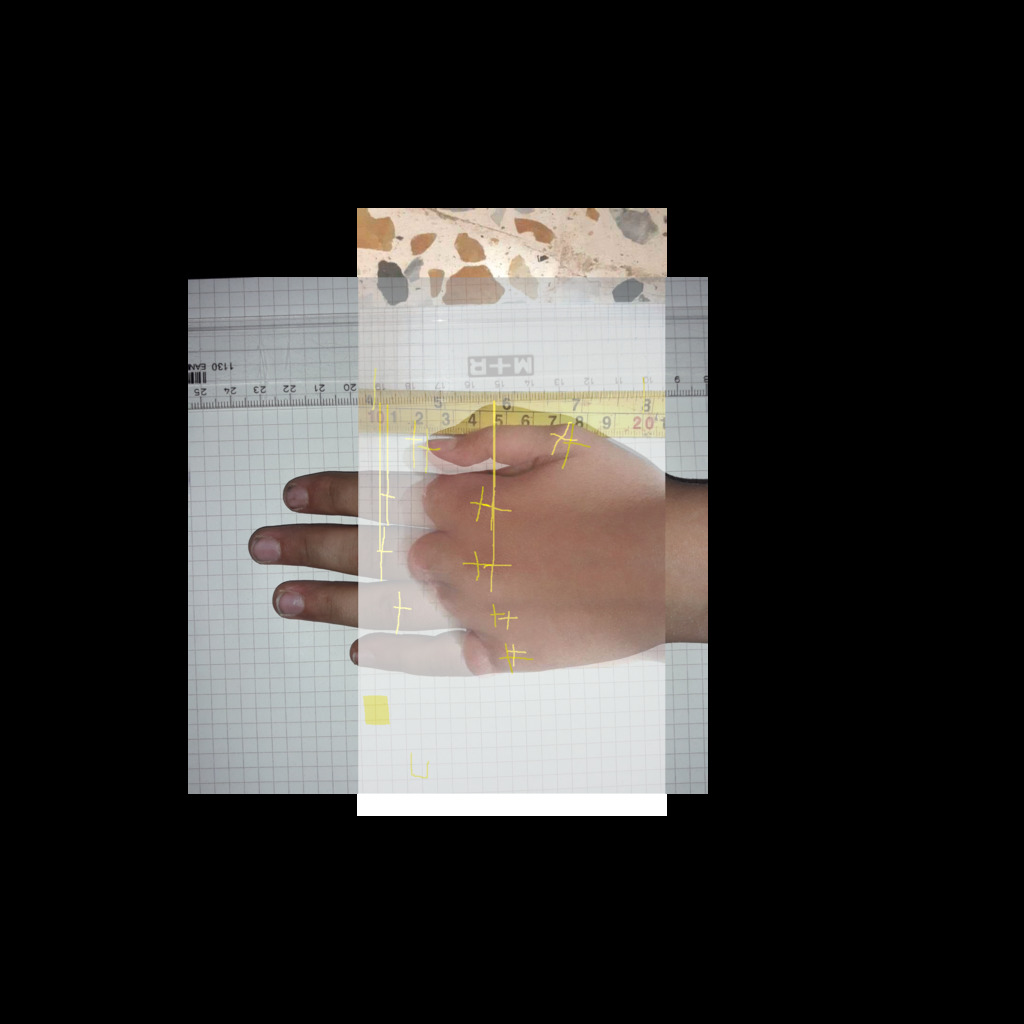
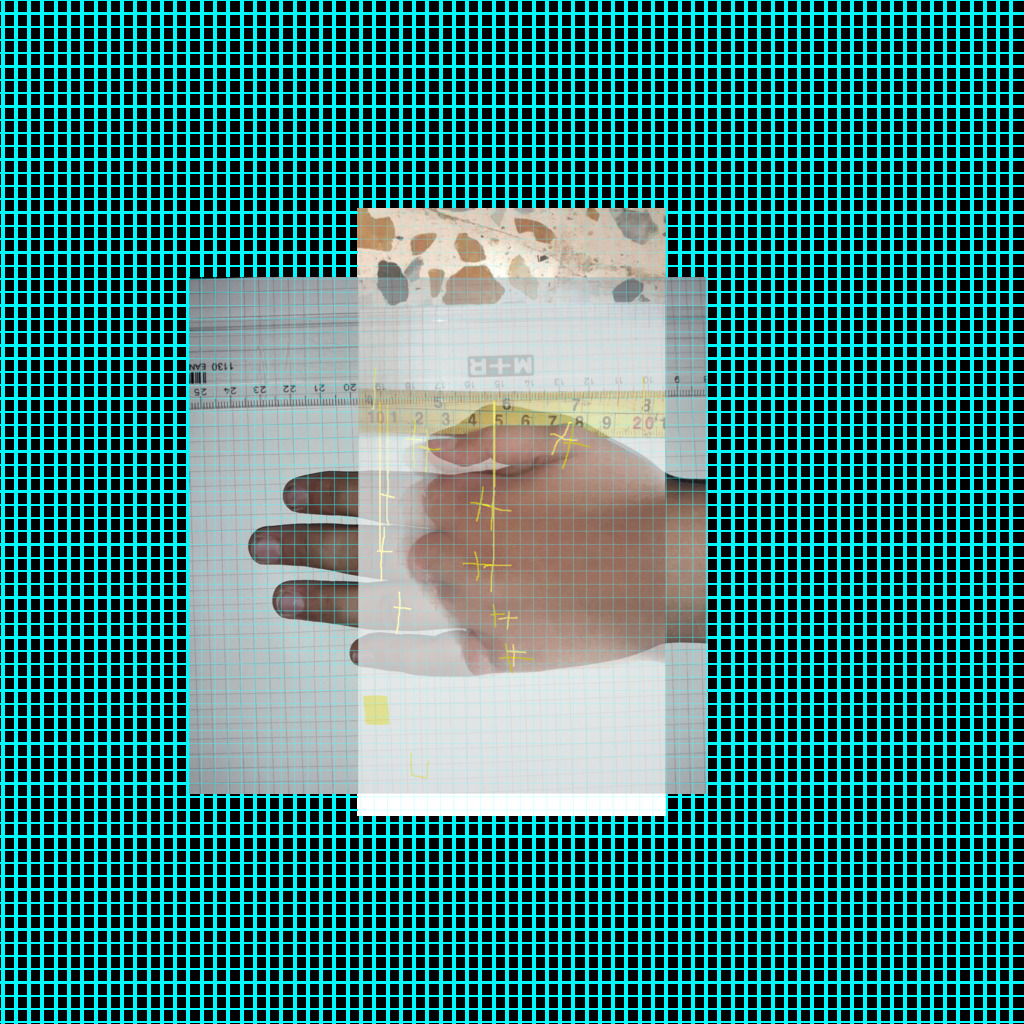
Overlay: receipients hand and sven's hand
Yellow marks show the position of the finger jonints to measure the length of the finger stubs.
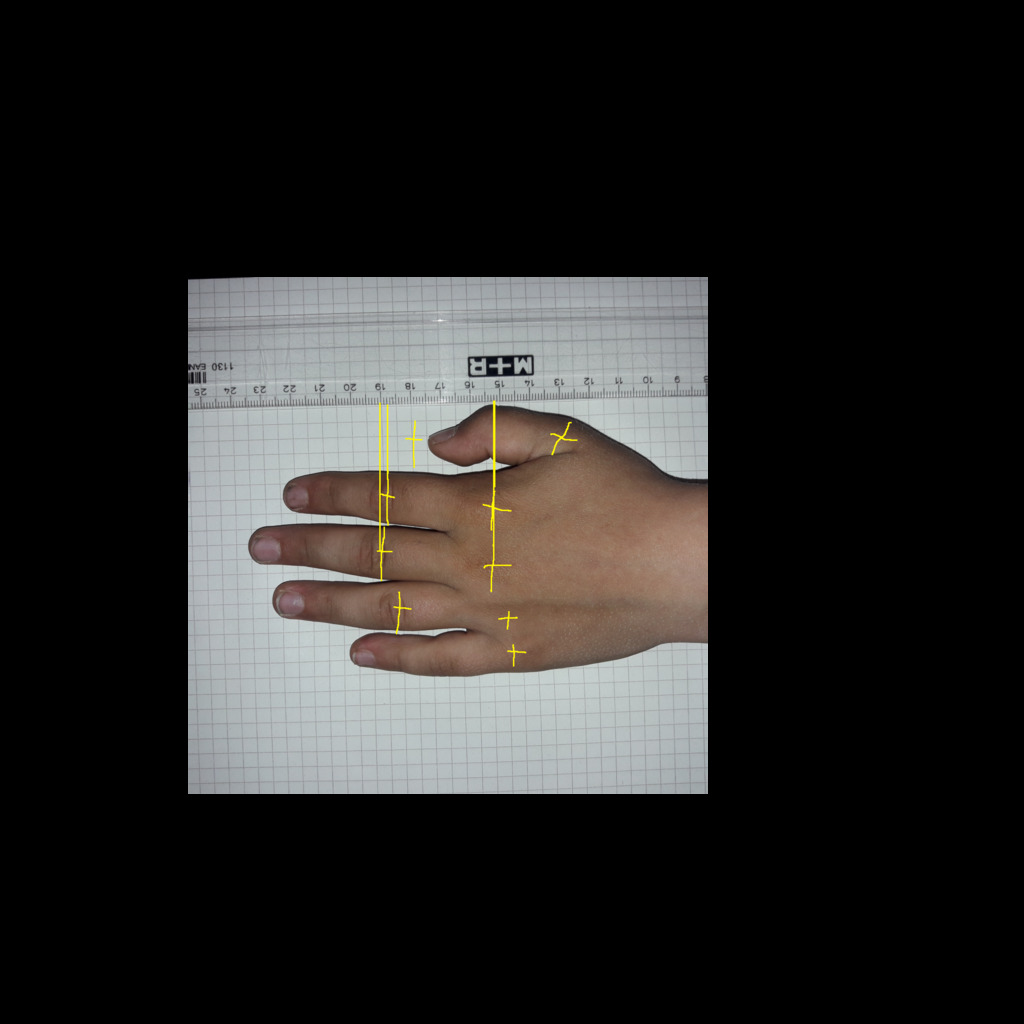
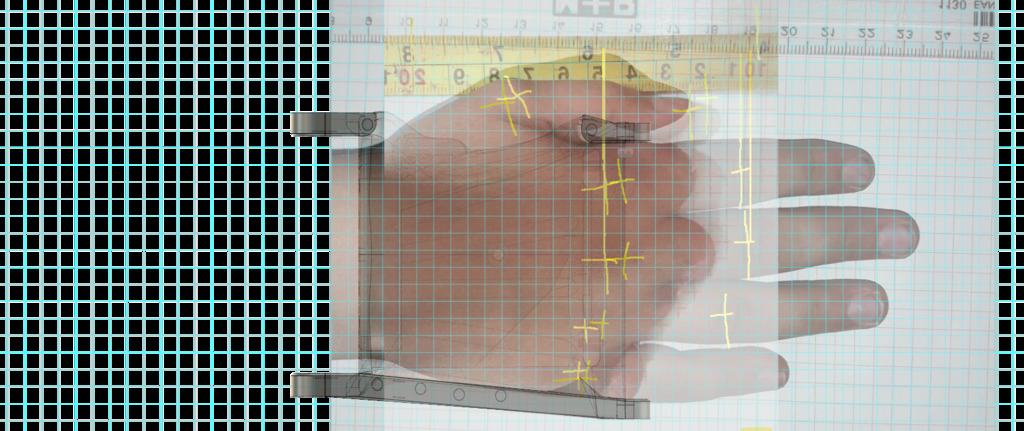
Overlay: hands with grid
Bashar's hand, sven's hand and both overlayed with a 5x5mm grid for measurements.
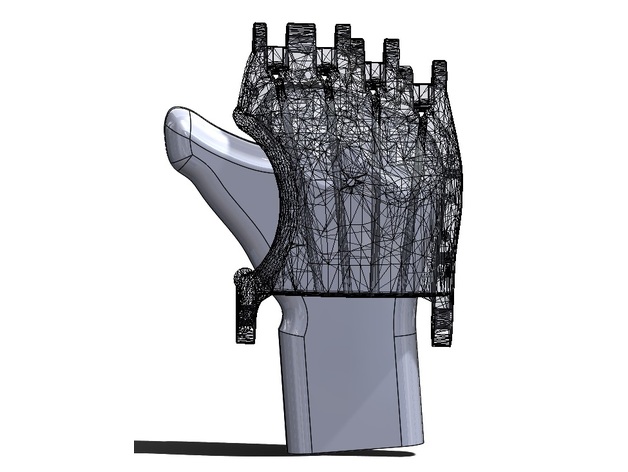
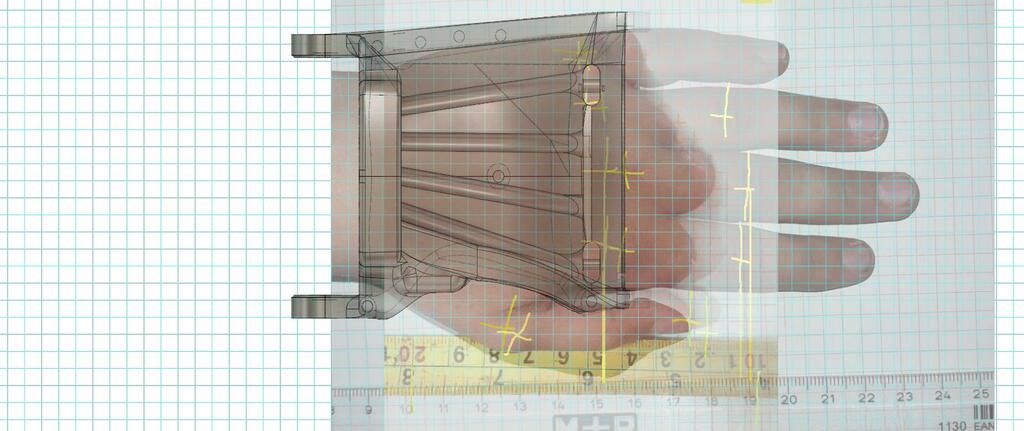
Modified thumbless Raptor
Marko did a redisign of the thumbless raptor hand, he writes:
A straigh forward scaling didn't work because the pinky is in the way, so I needed do do a major redesign of the palm. I am not completely happy with the palm modification, so there is still work to be done, but here is the status.
Original thumbless raptor overlay:
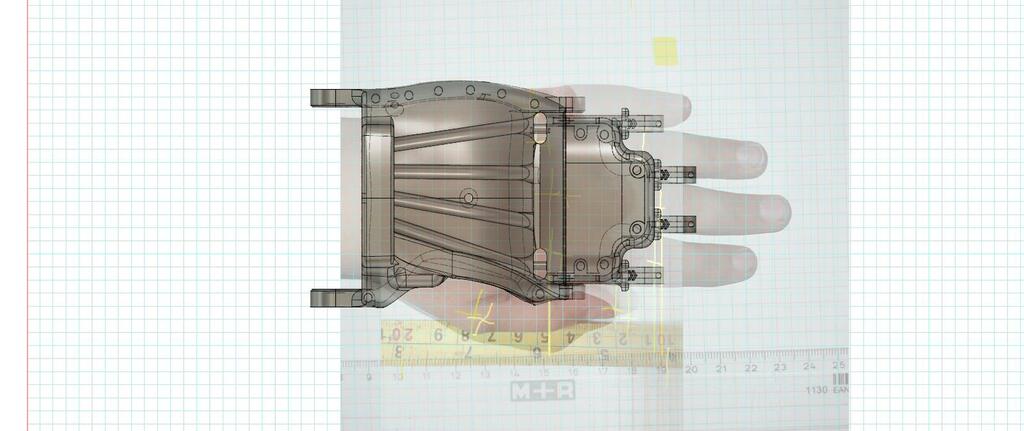
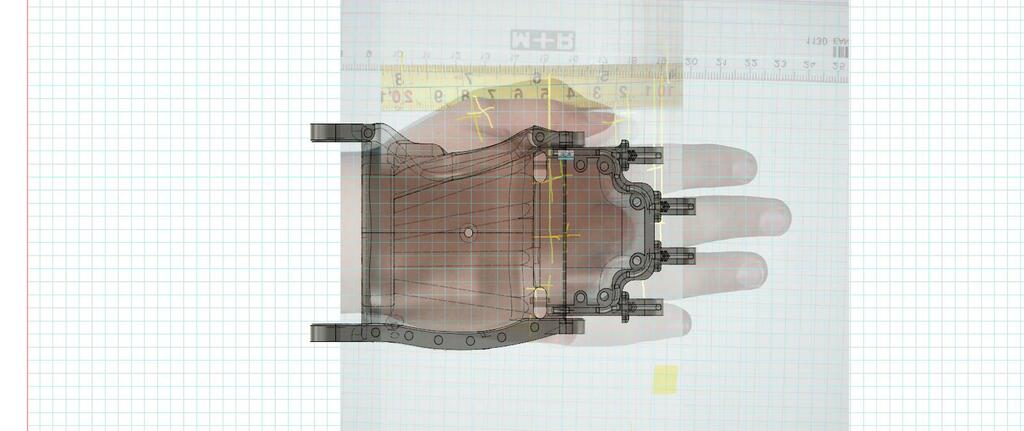
Some pictures of the modified/current state:
Questions
- How hard is it for firas to do email-/e-nable communication, for example to answer questions or to make additional photos?
- Is medical staff available on site (for proper fit and usage)?
Misc, unsorted
Some interesting images are in a similar e-nable case with id #1036 (from e-nable forum post https://hub.e-nable.org/s/e-nable-forum/?contentId=42674).


Some more interesting links (partial hands)
More cases and designs for partial hands with existing thubm/fingers.
Flexy Index, https://www.thingiverse.com/thing:4845022

Cathy's Lucky Fin V3, https://www.thingiverse.com/thing:4902137

E-nable forum post, https://hub.e-nable.org/s/e-nable-forum/?contentId=47986
E-nable forum post Devices for Users with Existing Finger & Thumb Anatomy, https://hub.e-nable.org/s/device-customization/?contentId=46146


Design from Pix3D (https://www.facebook.com/PIXEDCORP/)

Links
- E-nable forum thread about this case: https://hub.e-nable.org/s/e-nable-forum/?contentId=43287
- Similar case from the e-nable forum: https://hub.e-nable.org/s/e-nable-forum/?contentId=55550
- Another similar case from the e-nable forum: https://hub.e-nable.org/s/e-nable-forum/?contentId=55550
- Collection of "Devices for Users with Existing Finger & Thumb Anatomy": https://hub.e-nable.org/s/device-customization/?contentId=46146
Log
Thu Jun 9 16:55:28 CEST 2022 Updated "links" section this page. Asked about the mobility/usability/strength of Bashar's finger-stumbs. The answer is: "Bashar can move the left of his fingers very well and he can make a fist and grab a few things things with it" This information makes a knick-/kinetic-finger design more feasible... Tue Nov 2 10:38:19 CET 2021 Marko posted some results of his work ont the thumbless raptor hand. He writes: "I would like to share with you where I am at with the modification of the thumbless raptor hand for Bashar. A straigh forward scaling didn't work because the pinky is in the way, so I needed do do a major redesign of the palm. I am not completely happy with the palm modification, so there is still work to be done, but here is the status." Added more links to information and pictures of cases with partial hands/existing fingers. Wed Jun 30 14:18:30 CEST 2021 Added the *kinetic hand* to the list of possible devices. Added the *Raptor Reloaded Thumbless & Extra length for three fingers* to the list of possible devices. Measurements: overlay hand photos with a 5x5mm grid for measurements. Wed Jun 16 23:54:29 CEST 2021 Experimenting with gimp, overlayed receipients hand with sven's hand, see *Testmodel of hand* chapter. Fri Jun 11 12:54:48 CEST 2021 Marko suggested a *thumbless raptor hand*.